") 解析機(jī)器人平衡缸控制閥的位置
解析機(jī)器人平衡缸控制閥的位置

焊鉗結(jié)構(gòu):---平衡缸的位置
平衡缸控制閥的位置:
MPYD為壓差控制閥,可對平衡缸壓力在+/-10bar之間調(diào)節(jié),由機(jī)器人控制給入:
焊鉗進(jìn)行位置模式控制下:
平衡氣缸處于縮回位置ΔP < 0
焊接臂頂住螺釘,停止鎖死位置,E719
焊鉗在力模式控制下:
平衡氣缸處于伸出位置 ΔP > 0
焊接臂自由狀態(tài),浮動位置.! E719
機(jī)器人控制A729-A736:平衡缸壓力設(shè)定:采用二進(jìn)制控制.BIN2
$BIN_OUT[2]={F_BIT 729,LEN 8,PARITY #NONE}
5: bin2 ( EIN ) = 114在夾緊焊接前會通過二進(jìn)制給焊鉗平衡缸值
6: WARTE BIS !E129 + E26
7: SPSMAKRO80 = EIN 焊接程序
bin2 ( EIN ) =0-255 /壓力值: -10-à+1010bar
E12平衡缸超時:原因:平衡氣缸,MPVD平衡缸比例閥,線束.
出現(xiàn)平衡故障時:
1.如果MPVD氣閥沒有壞時,可以通過用WD-40進(jìn)行潤滑氣缸.
2.如果潤滑無效直接檢查連線.
3.連線無問題,直接換MPYD閥.
平衡缸回位信號:焊接過程時如果平衡系統(tǒng)沒有問題時,平衡缸回位反饋E719應(yīng)該是沒有反饋的,而當(dāng)進(jìn)行軸運行時E719要始終有.
拆解MPVD控制閥:
責(zé)任編輯:pj
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
平衡
+關(guān)注
關(guān)注
0文章
20瀏覽量
14739 -
控制閥
+關(guān)注
關(guān)注
1文章
96瀏覽量
14477
發(fā)布評論請先 登錄
相關(guān)推薦
熱點推薦
在 VisionFive 2 上實現(xiàn)機(jī)器人伺服控制
到 VisionFive:
連接:
演示中使用的機(jī)器人平臺由兩個伺服組成,可以連接到0和1伺服控制板的端口。
連接完成后,需要按照以下說明檢查并確保伺服控制板連接正確:
輸出結(jié)果40上圖中代表默認(rèn)
發(fā)表于 03-05 07:09
Infineon移動機(jī)器人電機(jī)控制方案深度解析
Infineon移動機(jī)器人電機(jī)控制方案深度解析 在當(dāng)今科技飛速發(fā)展的時代,移動機(jī)器人在物流、生產(chǎn)、服務(wù)等眾多領(lǐng)域的應(yīng)用日益廣泛。電機(jī)控制作為
柔順與施力控制:協(xié)作機(jī)器人在復(fù)雜任務(wù)中的核心優(yōu)勢
在現(xiàn)代工業(yè)自動化領(lǐng)域,協(xié)作機(jī)器人正逐漸成為打磨、裝配、醫(yī)療手術(shù)等精密作業(yè)中不可或缺的力量。而真正讓協(xié)作機(jī)器人區(qū)別于傳統(tǒng)機(jī)器人的關(guān)鍵,在于其先進(jìn)的柔順控制與施力

壓電與電磁驅(qū)動導(dǎo)葉機(jī)構(gòu)控制閥的性能對比研究:頻響、啟閉與靜態(tài)流量特性
壓電驅(qū)動液阻全橋先導(dǎo)控制閥的核心在于其獨特的液阻網(wǎng)絡(luò)設(shè)計,該網(wǎng)絡(luò)由固定液阻和可變液阻組合構(gòu)成,形成類似電橋的液壓回路。在控制閥的左側(cè)腔體,進(jìn)出口處均設(shè)置有固定液阻,這使得該腔內(nèi)壓力保持相對穩(wěn)定。

高精度機(jī)器人控制的核心——基于 MYD-LT536 開發(fā)板的精密運動控制方案
模塊基于歷史誤差趨勢自動擬合機(jī)器人位置反饋誤差模型,最終使裝配誤差穩(wěn)定在 ±0.05 mm 以內(nèi)。
整個系統(tǒng)架構(gòu)緊湊、響應(yīng)快速,為高精度裝配提供了可靠的技術(shù)底座。
四、面向未來的機(jī)器人控
發(fā)表于 11-14 15:48
Arduino Uno l兩輪自平衡機(jī)器人 電機(jī)驅(qū)動無輸出求解
Arduino Uno l兩輪自平衡機(jī)器人 電機(jī)驅(qū)動無輸出求解
發(fā)表于 10-15 06:36
泰德航空帶你深入解析加油控制閥:航空燃油系統(tǒng)的&quot;精密指揮官&quot;
在現(xiàn)代工業(yè)與航空領(lǐng)域,燃油輸送的精確控制是一項關(guān)乎效率、安全與可靠性的關(guān)鍵技術(shù)。作為燃油系統(tǒng)的核心控制元件,加油控制閥的重要性不言而喻。這類精密閥門不僅要確保燃油的高效輸送,還需在極端工況下維持穩(wěn)定

保持平衡及運動控制:人形機(jī)器人 IMU 芯片推薦
電子發(fā)燒友網(wǎng)綜合報道 目前,人形機(jī)器人對 IMU(慣性測量單元)芯片的需求主要集中在高實時性、高精度、小尺寸、低功耗等方向,尤其適用于姿態(tài)控制、平衡維持、導(dǎo)航定位與動作執(zhí)行等關(guān)鍵場景。 ? 具體而言
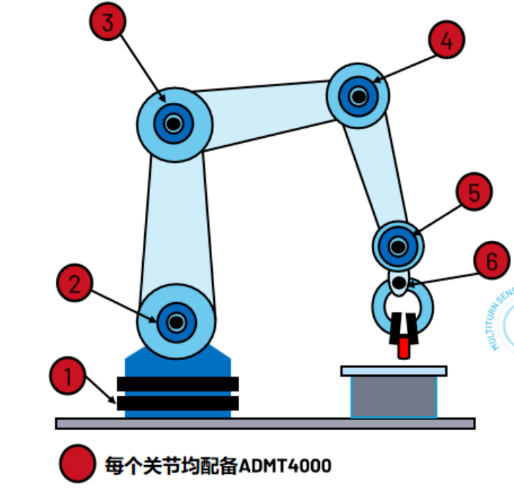
ADI ADMT4000磁性位置傳感器助力人形機(jī)器人關(guān)節(jié)設(shè)計
人形機(jī)器人作為集成了機(jī)械制造、控制技術(shù)與人工智能等多學(xué)科的復(fù)雜系統(tǒng),其運動控制的精確性與可靠性是衡量其性能的核心指標(biāo)。其中,關(guān)節(jié)的絕對位置感知,特別是在意外斷電重啟后的
機(jī)器人看點:越疆機(jī)器人正式發(fā)布六足仿生機(jī)器狗 智元公布機(jī)器人運動控制模型專利
”具身機(jī)器人平臺的企業(yè)。 此前越疆機(jī)器人發(fā)布的六足仿生機(jī)器狗是集“認(rèn)知、動作、機(jī)動”三大核心能力于一體的創(chuàng)新產(chǎn)品,而且六足架構(gòu)既具備優(yōu)于四足結(jié)構(gòu)的穩(wěn)定性和負(fù)載能力。 越疆六足仿生機(jī)器狗
雙電機(jī)驅(qū)動數(shù)字液壓閥的研發(fā)
液壓缸上的電液伺服閥。控制上與液壓缸的位移傳感器構(gòu)成位移閉環(huán),與力傳感器構(gòu)成力閉環(huán)控制:可以實現(xiàn)規(guī)則波和階機(jī)波的移動
發(fā)表于 06-19 10:59
機(jī)器人熱點:富士康推出全方位機(jī)器人平臺 宇樹科技更名或為IPO做準(zhǔn)備
給大家?guī)硪恍?b class='flag-5'>機(jī)器人熱點資訊: 富士康推出全方位機(jī)器人平臺 據(jù)5月29日,富士康董事長透露,富士康已成功構(gòu)建了一個全方位的機(jī)器人生產(chǎn)平臺。富士康此次推出的機(jī)器人制造平臺將對其生產(chǎn)線進(jìn)行
詳細(xì)介紹機(jī)場智能指路機(jī)器人的工作原理
帶)定位、Wi - Fi 定位等。藍(lán)牙定位可以通過與機(jī)場內(nèi)部署的藍(lán)牙信標(biāo)進(jìn)行通信,獲取機(jī)器人的大致位置信息。UWB 定位則利用超寬帶信號實現(xiàn)更精確的定位,能夠在復(fù)雜的室內(nèi)環(huán)境中達(dá)到較高的定位精度,誤差可控制
發(fā)表于 05-10 18:26
自制一個支持AI 控制的無刷平衡車機(jī)器人:開源項目D-BOT全攻略
今天給大家介紹一款創(chuàng)意桌面機(jī)器人——D-BOT!它不僅是一個功能強大的平衡車機(jī)器人,也是一個融合了AI控制、3D建模與PCB設(shè)計的開源項目。
D-BOT 被作者稱為“小探險家”(Di
發(fā)表于 04-28 11:45
【「# ROS 2智能機(jī)器人開發(fā)實踐」閱讀體驗】+內(nèi)容初識
出有用的信息,如障礙物的位置和形狀。對于攝像頭數(shù)據(jù),可以使用 OpenCV 等圖像處理庫進(jìn)行圖像識別、目標(biāo)跟蹤等操作,為機(jī)器人的導(dǎo)航和決策提供支持。
運動控制:運動控制是
發(fā)表于 04-27 11:24



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論