") 采用L298驅(qū)動模塊自制遙控小車
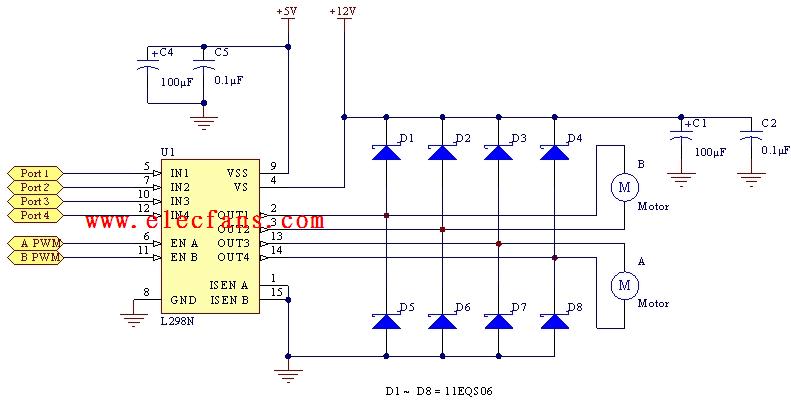
采用L298驅(qū)動模塊自制遙控小車

聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
鋰電池
+關注
關注
263文章
8670瀏覽量
185130 -
驅(qū)動
+關注
關注
12文章
1954瀏覽量
88522 -
Arduino
+關注
關注
190文章
6526瀏覽量
196914
發(fā)布評論請先 登錄
相關推薦
熱點推薦
采用樹莓派與L298N制作遙控小車全攻略
本文主要描述使用樹莓派和L298N制作一個簡單的遙控小車,遙控器使用簡單的WEB來實現(xiàn)。
L298電機驅(qū)動模塊的詳細講解
電動小車的組成
? 一個電動小車整體的運行性能,首先
取決于它的電源模塊和電機驅(qū)動模塊。
? 電機驅(qū)動
發(fā)表于 02-26 15:53
步進電機驅(qū)動芯片L298問題
最近學習步進電機,用L297+L298控制一個兩相四線的步進電機,將4個線分別接在L298的四個輸出,可以正常驅(qū)動。現(xiàn)在的問題是L298的手冊說它可以同時
發(fā)表于 07-02 13:39
關于L298扭曲信號的問題
我將STM32 F334R8微控制器連接到L298 H橋。我做了一些測量。問題是L298上的輸出信號具有相當慢的斜率,并且不像輸入信號那么尖銳。我不明白為什么會發(fā)生扭曲。如您所見,頻率非常低
發(fā)表于 09-18 16:04
L298驅(qū)動arduino的L298N電機驅(qū)動模塊和直流電機接線具體步驟
L298驅(qū)動arduino的L298N電機驅(qū)動模塊和直流電機接線具體步驟如下:1.第一步,將數(shù)字3、4腳接
發(fā)表于 09-08 07:52
L298驅(qū)動步進電機
本系統(tǒng)采用STM32作為主控制芯片,用L298驅(qū)動步進電機,并由按鍵分別控制步進電機的啟/停,快速/慢速,整步/半步,正轉(zhuǎn)/反轉(zhuǎn),發(fā)光二極管顯示按鍵情況。實現(xiàn)了步進電機的基本功
發(fā)表于 09-23 16:00
?721次下載
L298N驅(qū)動模塊和智能車資料合集免費下載
本文檔的主要內(nèi)容詳細介紹的是L298N驅(qū)動模塊和智能車資料合集免費下載主要內(nèi)容包括了:L298N驅(qū)動模塊
發(fā)表于 05-30 16:11
?94次下載
51單片機 L298驅(qū)動2路電機PWM調(diào)速+Proteus仿真
51單片機 L298驅(qū)動2路電機PWM調(diào)速+Proteus仿真Proteus仿真實例代碼
發(fā)表于 11-23 17:06
?70次下載




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論