
在SCL中使用浮點數(shù)REAL和LREAL進(jìn)行計算
例如,數(shù)據(jù)類型 REAL 在程序中以 6 位小數(shù)的精度進(jìn)行指定和計算。在計算浮點數(shù)(REAL和 LR....
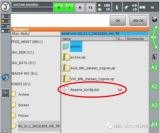
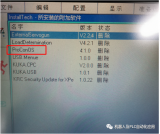
KUKA部件調(diào)試系統(tǒng)文件
調(diào)試系統(tǒng)文件 在進(jìn)行更改之前,強烈建議對機器人進(jìn)行備份。 更改$config.dat的要求是注冊為“....



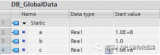
全局?jǐn)?shù)據(jù)包通信簡介
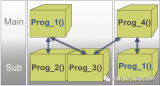
1?全局?jǐn)?shù)據(jù)包通信簡介 對于PLC之間的數(shù)據(jù)交換,只關(guān)心數(shù)據(jù)的發(fā)送區(qū)和接收區(qū),全局?jǐn)?shù)據(jù)包的通信方式是....

讀取機器人程序中的變量
其中包含引用解釋器的進(jìn)程指針的數(shù)據(jù). 變量包含接下來將在解釋器中執(zhí)行的塊的數(shù)據(jù)。 根據(jù)特定的解釋器,....



![KUKA系統(tǒng)變量:$IOBUS_INFO[]讀取是否出現(xiàn)總線故障](https://file1.elecfans.com/web2/M00/88/A5/wKgaomRt5W-AR4GmAAAYSRZEjrw798.png)
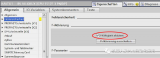
博途系統(tǒng)變量-GET_NAME:讀取IO設(shè)備或DP從站的名稱
GET_NAME”指令用于讀取 IO 設(shè)備或 DP 從站的名稱。該名稱將顯示在網(wǎng)絡(luò)視圖和 IO 設(shè)備....


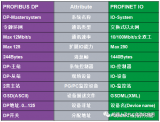
環(huán)形拓?fù)浣Y(jié)構(gòu)中的PROFINET介質(zhì)冗余性
為了提高具有光纖或電氣線形總線型拓?fù)浣Y(jié)構(gòu)的工業(yè)以太網(wǎng)的網(wǎng)絡(luò)可用性,可以通過將終端設(shè)備連接在一起,將線....

KUKA系統(tǒng)變量:$PROG_INFO
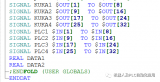
$PROG_INFO[]將某些系統(tǒng)狀態(tài)組合在一個結(jié)構(gòu)中。 $PROG_INFO[ Interpret....
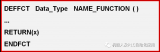
KUKA 機器人編程語句SWITCH介紹
在幾個語句分支中選擇。? SWITCH 選擇標(biāo)準(zhǔn) CASE 標(biāo)記 1 指令塊 ? 指令塊 > 默認(rèn)指....

KUKA E6POS結(jié)構(gòu)類型的變量定義
$POS_ACT 當(dāng)前笛卡爾機器人位置 E6POS結(jié)構(gòu)類型的變量定義了TCP相對于BASE坐標(biāo)系的設(shè)....

如何用halcon和C#進(jìn)行聯(lián)合開發(fā)
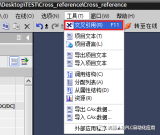
? 導(dǎo)出文件? 如需與其他語言進(jìn)行聯(lián)合編程,可以在文件--->導(dǎo)出中導(dǎo)出所需要的相應(yīng)語言。? 導(dǎo)出的....

WorkVisual由現(xiàn)場總線設(shè)備編輯信號
現(xiàn)場總線信號可在 WorkVisual 中進(jìn)行編輯。例如可更改信號寬度,或調(diào)換字節(jié)順序。 1. 在窗....

KUKA機器人中-TCP通訊里純理論的東西
對于未初始化的變量或數(shù)組元素,會將隨機值寫入緩沖區(qū)。由于隨機值可能會導(dǎo)致緩沖區(qū)接收器出現(xiàn)問題,因此建....




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)