KUKA8.2系統(tǒng)下C4機器人虛擬外部軸E1的設(shè)置深層分析
與它相配合還要有相對應(yīng)的USER用戶程序組建,只要是標(biāo)準(zhǔn)用戶程就行,不能和激光焊的標(biāo)準(zhǔn)組件混用。
PLC組態(tài)KUKAC4-Profisafe安全設(shè)置
KUKA在PLC中組態(tài),注意KUKA的GSD文件的PN軟件版本與KUKA設(shè)置的PN軟件版本一致。

PROFINET IO Web網(wǎng)頁控制-使用入門
另外,與CP卡不同,集成的WEB服務(wù)器的CPU本身不提供任何的安全機制,那么如果需要防止非授權(quán)的訪問....



KUKAC4機器人零點校正
零點標(biāo)定可通過確定軸的機械零點的方式進行。在此過程中軸將一直運動,直至達到機械零點為止。這種情況出現(xiàn)....

滾床控制SEW變頻器的PLC控制
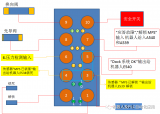
MOVIFIT的安全S11的控制原理電路圖,安全電路控制逆變電路的控制電源,從而切斷電機的電源。
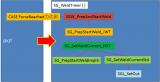
TYP--PLC車型評估選擇之完成添加車型工作
庫數(shù)據(jù)塊 DB529"DB_Typ_Var" 用作帶有效車身型號的數(shù)據(jù)塊的創(chuàng)建模板(與工廠有關(guān))。....
螺栓自動擰緊技術(shù)
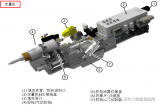
螺栓自動擰緊設(shè)備主要由螺栓擰緊設(shè)備,送料器,控制器,鏈接機構(gòu)組成 。1.螺栓擰緊設(shè)備(將螺釘擰緊在工....





KUKA機器人視覺抓取的工作原理講解
BASE坐標(biāo)系: 可根據(jù)需要定義用戶坐標(biāo)系。 當(dāng)機器人配備多個工作臺時,選擇用戶坐標(biāo)系可使操作更為簡....
![最新-FB148[系統(tǒng)診斷]的新增點](https://file.elecfans.com/web1/M00/BE/D9/pIYBAF7jIceAM9_NAABbBSvt9oM194.png)

KUKA 變成語句:WHILE循環(huán)的原理及在電伺服焊鉗銑削里應(yīng)用
WHILE 循環(huán)是一種當(dāng)型或者先判斷型循環(huán),這種循環(huán)會在執(zhí)行循環(huán)的指令部分前先判斷終止條件是否成立。
KUKA _SafeRobot->SafeOperation檢查參考
如果當(dāng)前位置和參考位置之間的偏差太大,則調(diào)整參考失敗。機器人以安全停止1停止,并且只能在操作模式T1....


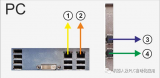
KUKA C 4的網(wǎng)卡Dual NIC
在 KRC4 中,DualNIC在設(shè)備管理器里面不是顯示在【網(wǎng)絡(luò)適配器】之下。該網(wǎng)卡不受 Windo....

竟然開始學(xué)習(xí)上了KUKA.Ethernet KRL
通過 XML 文件配置以太網(wǎng)連接。針對每個連接,必須在機器人控制系統(tǒng)的目錄 C:KRCROBOTER....
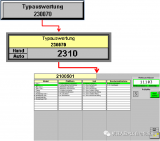
一個PLC用于與車號分配PC聯(lián)網(wǎng)的功能塊
兩個通信伙伴都調(diào)用FB 65 "TCON"來設(shè)置和建立通信連接。在這些參數(shù)中,您要指定哪個伙伴是主動....

機器人內(nèi)部的控制總線KCB和系統(tǒng)總線KSB
EtherCAT(以太網(wǎng)控制自動化技術(shù))是一個開放架構(gòu),以以太網(wǎng)為基礎(chǔ)的現(xiàn)場總線系統(tǒng),其名稱的CAT....

涂膠定量機原理
涂膠設(shè)備定量機電機采用增量式電機,每次斷電重啟后都要自動進行零點校正,也就是找到它上行程開光。



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)