ToF深度傳感的基本原理和主要方法
飛行時(shí)間(ToF)相機(jī)憑借更小的外形尺寸、更寬的動(dòng)態(tài)感測(cè)范圍,以及在多種環(huán)境下工作的能力,成為首選的....

計(jì)算機(jī)視覺應(yīng)用中3大瓶頸問題及解決方案
本文摘自于:雷林建, 孫勝利, 向玉開, 張悅, 劉會(huì)凱. 2020. 智能制造中的計(jì)算機(jī)視覺應(yīng)用瓶....

雙目視覺簡(jiǎn)介及算法一般流程
1.1. 雙目視覺簡(jiǎn)介 雙目視覺廣泛應(yīng)用在機(jī)器人導(dǎo)航,精密工業(yè)測(cè)量、物體識(shí)別、虛擬現(xiàn)實(shí)、場(chǎng)景重建,勘....
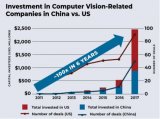
中國(guó)計(jì)算機(jī)視覺的前途在哪?
本文來自知乎上的同名問題,原文鏈接: 對(duì)幾個(gè)優(yōu)秀的回答進(jìn)行了整理,解釋權(quán)歸答主所有,如有侵權(quán)請(qǐng)聯(lián)系刪....

機(jī)器人視覺在定位等多個(gè)方面發(fā)展出來各種方法
機(jī)器人視覺是一種處理問題的研究手段。經(jīng)過長(zhǎng)時(shí)間的發(fā)展,機(jī)器人視覺在定位,識(shí)別,檢測(cè)等多個(gè)方面發(fā)展出來....

這三種學(xué)習(xí)模式在于深度學(xué)習(xí)的未來
作者 | Andre Ye 譯者 | 平川 策劃 | 陳思 深度學(xué)習(xí)是一個(gè)廣闊的領(lǐng)域,它圍繞著一種形....

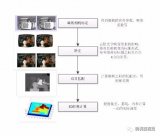
利用圖像處理方法進(jìn)行瑕疵檢測(cè)的總結(jié)
作者:cshyxxxl 以iPhone背殼為例,進(jìn)行瑕疵檢測(cè) 需求:利用傳統(tǒng)算法檢測(cè)iPhone手機(jī)....
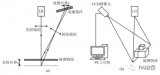
簡(jiǎn)析激光三角測(cè)量技術(shù)的發(fā)展應(yīng)用前景
激光三角測(cè)量技術(shù)的應(yīng)用與前景 作者簡(jiǎn)介 陶衛(wèi)(1975),女,博士,研究員,上海交通大學(xué)電子信息與電....
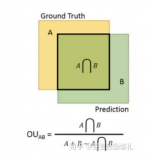
傳統(tǒng)檢測(cè)、深度神經(jīng)網(wǎng)絡(luò)框架、檢測(cè)技術(shù)的物體檢測(cè)算法全概述
物體檢測(cè)一向是比較熱門的研究方向,它經(jīng)歷了傳統(tǒng)的人工設(shè)計(jì)特征+淺層分類器的框架,到基于大數(shù)據(jù)和深度神....

利用AGV導(dǎo)航激光定位技術(shù)解決移動(dòng)機(jī)器人取卸貨不成功的問題
文|機(jī)械科學(xué)研究總院 機(jī)科發(fā)展科技股份有限公司 劉媛媛、徐京邦、張豐華、王小鐸、劉之舟 針對(duì)移動(dòng)機(jī)器....

四大趨勢(shì)推動(dòng)機(jī)器視覺應(yīng)用發(fā)展和對(duì)行業(yè)未來的影響
本文討論了推動(dòng)視覺應(yīng)用快速發(fā)展和影響行業(yè)未來的關(guān)鍵趨勢(shì),解釋了這些趨勢(shì)背后的推動(dòng)因素,并強(qiáng)調(diào)了對(duì)技術(shù)....
機(jī)器視覺對(duì)掃描相機(jī)成像的影響
從天文成象中,我們知道各種大氣條件和天氣影響對(duì)成象質(zhì)量有影響。這是由于光程中空氣的折射率發(fā)生了局部變....


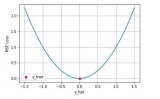
機(jī)器學(xué)習(xí)和深度學(xué)習(xí)中分類與回歸常用的幾種損失函數(shù)
本文將介紹機(jī)器學(xué)習(xí)、深度學(xué)習(xí)中分類與回歸常用的幾種損失函數(shù),包括均方差損失 Mean Squared....
10個(gè)流行的Python庫平臺(tái)
作為開發(fā)人員喜愛的語言之一,Python以其豐富的社區(qū)可用工具和庫而聞名。我們列出了開發(fā)人員可以用于....
機(jī)器視覺在工業(yè)上的應(yīng)用領(lǐng)域
機(jī)器視覺在工業(yè)上應(yīng)用領(lǐng)域廣闊,核心功能包括:測(cè)量、檢測(cè)、識(shí)別、定位等。
什么是3D成像_3D成像應(yīng)用
計(jì)算機(jī)視覺爆炸式發(fā)展的背后是3D成像領(lǐng)域的巨大發(fā)展。今天的3D成像是什么狀態(tài),我們的發(fā)展方向是什么?
機(jī)器學(xué)習(xí)的幾個(gè)超參數(shù)調(diào)試方法
作者:Sivasai,來源:AI公園導(dǎo)讀 ML工作流中最困難的部分之一是為模型找到最好的超參數(shù)。ML....


ARM賣身又一次創(chuàng)下芯片屆最大交易記錄
ARM架構(gòu)的處理器以低電耗為優(yōu)勢(shì),在全世界的智能手機(jī)及平板電腦中運(yùn)用廣泛。四年前軟銀將其收購(gòu)時(shí),并未....
機(jī)器視覺系統(tǒng)工程中常見問題及處理技巧匯總
該工具可在與周圍濃淡等級(jí)進(jìn)行比較的同時(shí)檢測(cè)瑕疵和污點(diǎn)等缺陷。不僅具備卓越的檢測(cè)能力,還可僅篩選出大小....
深度學(xué)習(xí)&計(jì)算機(jī)視覺方向的相關(guān)面試題
反卷積也稱為轉(zhuǎn)置卷積,如果用矩陣乘法實(shí)現(xiàn)卷積操作,將卷積核平鋪為矩陣,則轉(zhuǎn)置卷積在正向計(jì)算時(shí)左乘這個(gè)....
OpenCV快速傅里葉變換(FFT)模糊檢測(cè)
缺點(diǎn)是,Laplacian方法需要大量手動(dòng)調(diào)整用于定義圖像是否模糊的”閾值“。如果你能控制你的光線條....
盤點(diǎn)下那些叱咤在2020工博會(huì)上的工業(yè)機(jī)器人
當(dāng)今,在物聯(lián)網(wǎng)和大數(shù)據(jù)等技術(shù)下,智能制造被賦予了新的內(nèi)涵,企業(yè)需要數(shù)字化轉(zhuǎn)型,這在業(yè)內(nèi)已是共識(shí)。為此....

機(jī)器視覺在工業(yè)上的需求
主要閱讀書籍《工程光學(xué)》、重點(diǎn)放在幾何光學(xué)方面,了解成像原理及相應(yīng)的光路分析,知道光源的特性、鏡頭分....
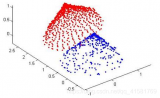
點(diǎn)云匹配與ICP算法基本思想
ICP(Iterative Closest Point迭代最近點(diǎn))算法是一種點(diǎn)集對(duì)點(diǎn)集配準(zhǔn)方法。如下....
3D相機(jī)的類別及工作原理
3D相機(jī)的不同之處在于,它可以測(cè)量普通數(shù)碼相機(jī)無法測(cè)量的深度數(shù)據(jù)。所謂深度數(shù)據(jù),就是像素到相機(jī)的距離....



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)