
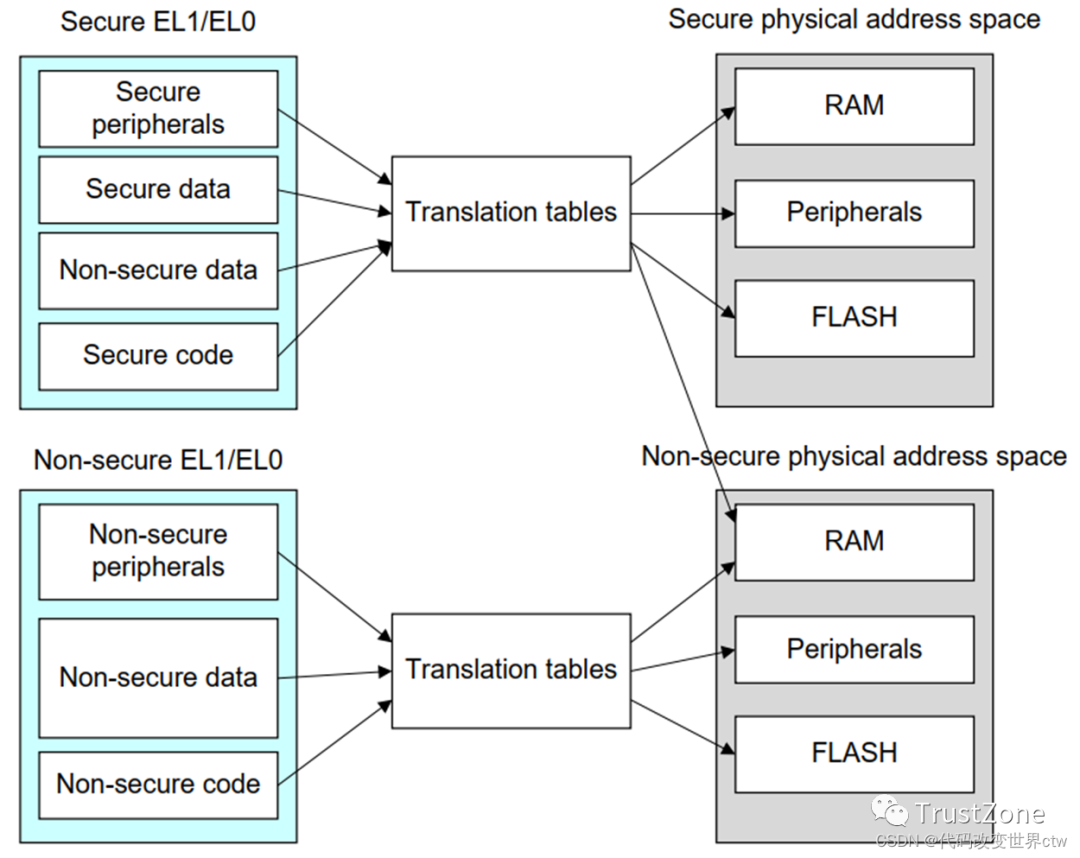
MMU訪問(wèn)權(quán)限控制
訪問(wèn)權(quán)限控制 TrustZone技術(shù)之所以能提高系統(tǒng)的安全性,是因?yàn)閷?duì)外部資源和內(nèi)存資源的硬件隔離。....
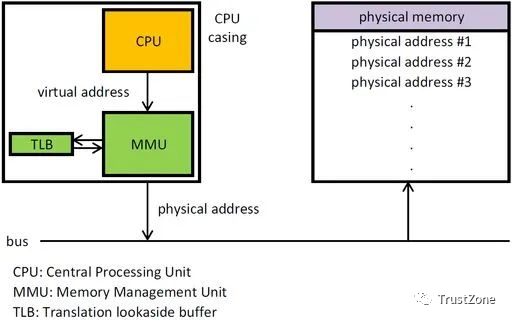
內(nèi)存管理單元的重要功能是什么
微觀理解 內(nèi)存管理單元(MMU)的一個(gè)重要功能是使系統(tǒng)能夠運(yùn)行多個(gè)任務(wù),作為獨(dú)立的程序運(yùn)行在他們自己....
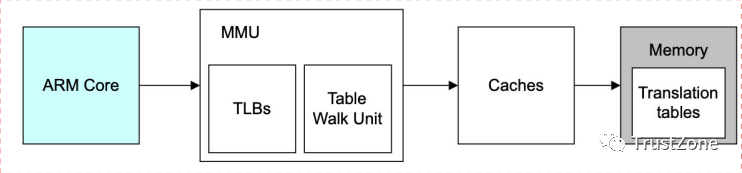
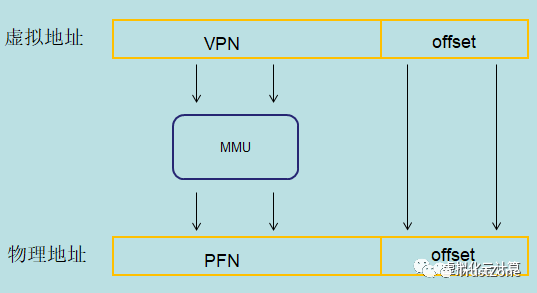
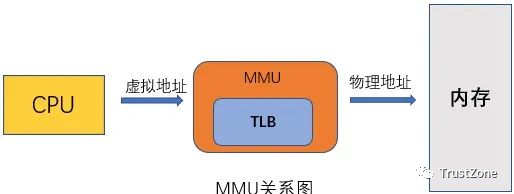
MMU內(nèi)存管理單元的宏觀理解
最近一直在學(xué)習(xí)內(nèi)存管理,也知道MMU是管理內(nèi)存的映射的邏輯IP,還知道里面有個(gè)TLB。 今天剛剛好看....

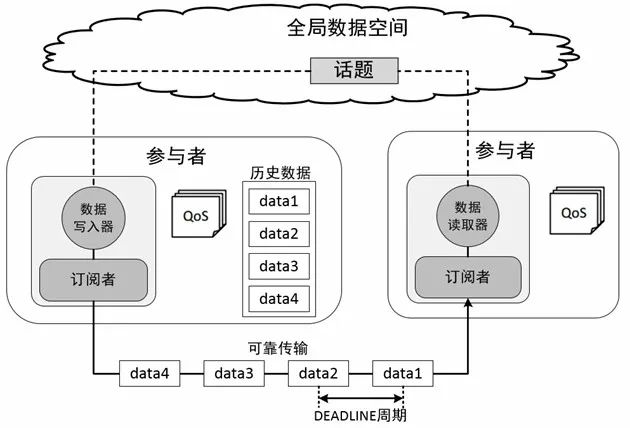
DDS為ROS的通信系統(tǒng)提供了哪些特性
質(zhì)量服務(wù)策略QoS DDS為ROS的通信系統(tǒng)提供了哪些特性呢?我們通過(guò)這個(gè)通信模型圖來(lái)看下。 DDS....

什么是通信模型DDS
Hello,大家好,歡迎來(lái)到《ROS2入門(mén)21講》,我是主講人古月。 終于講到ROS2中最為重大的變....
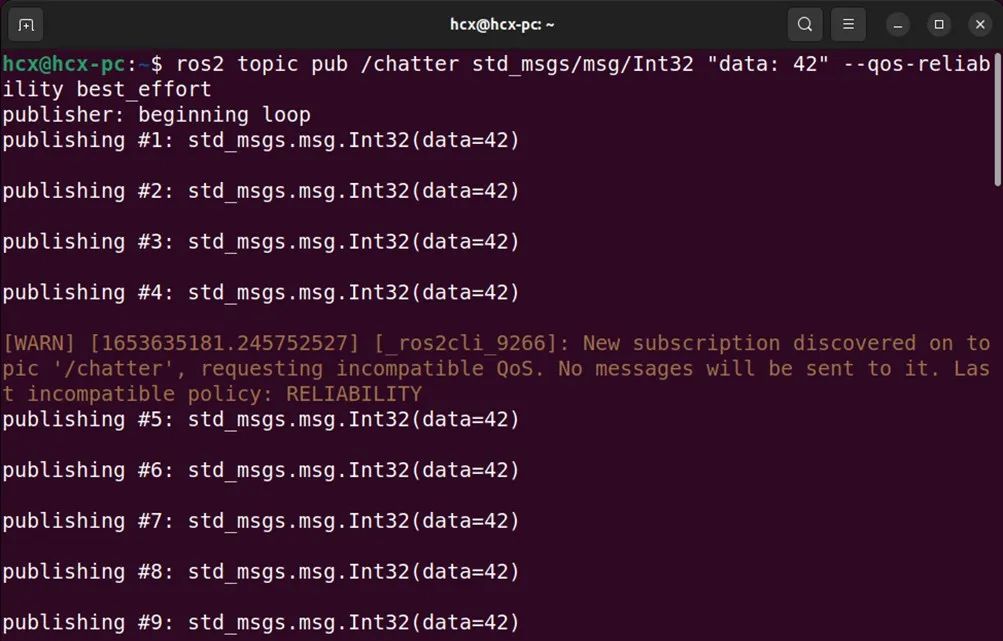
SPI同步串行通信運(yùn)行示例程序
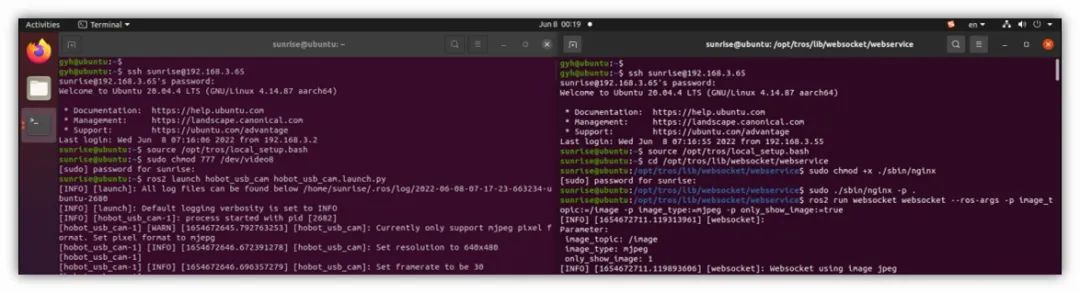
運(yùn)行示例程序 大家來(lái)運(yùn)行例程,看看會(huì)發(fā)生什么? $ sudo python3 test_spi.py....

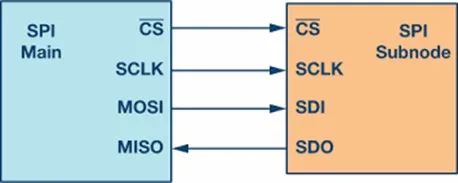
SPI通信協(xié)議原理是什么
UART串口通信中的數(shù)據(jù)只能一位一位的傳輸,如果數(shù)據(jù)量比較大的時(shí)候,傳輸速率會(huì)受到很大影響,此時(shí)我們....
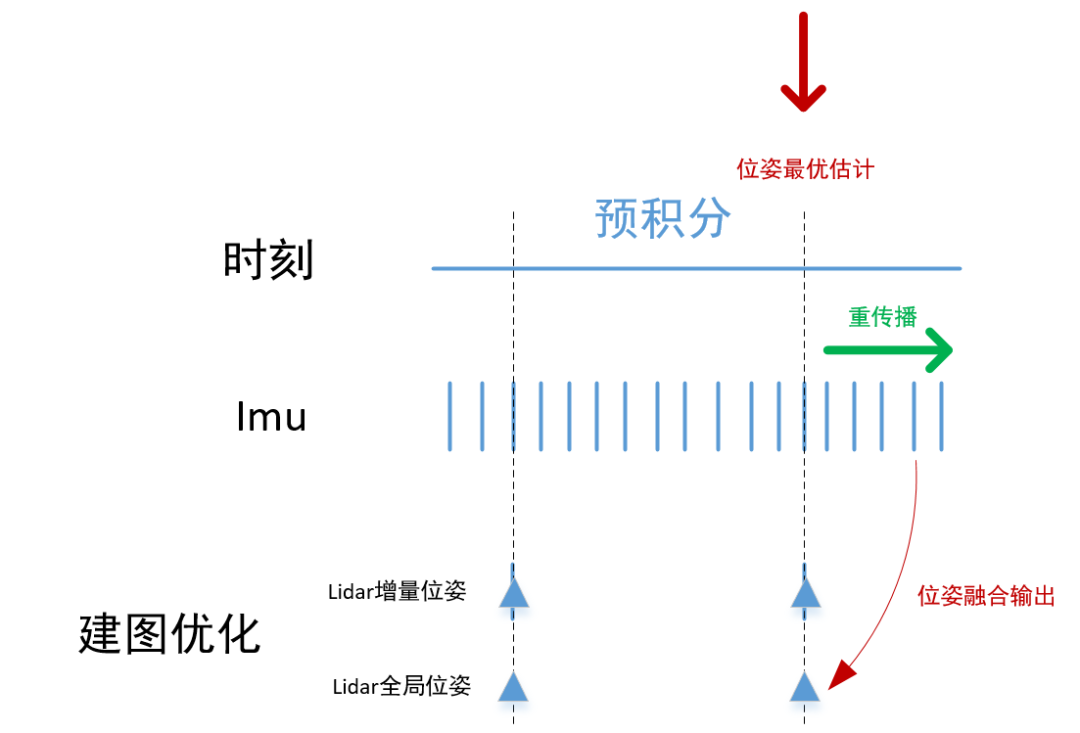
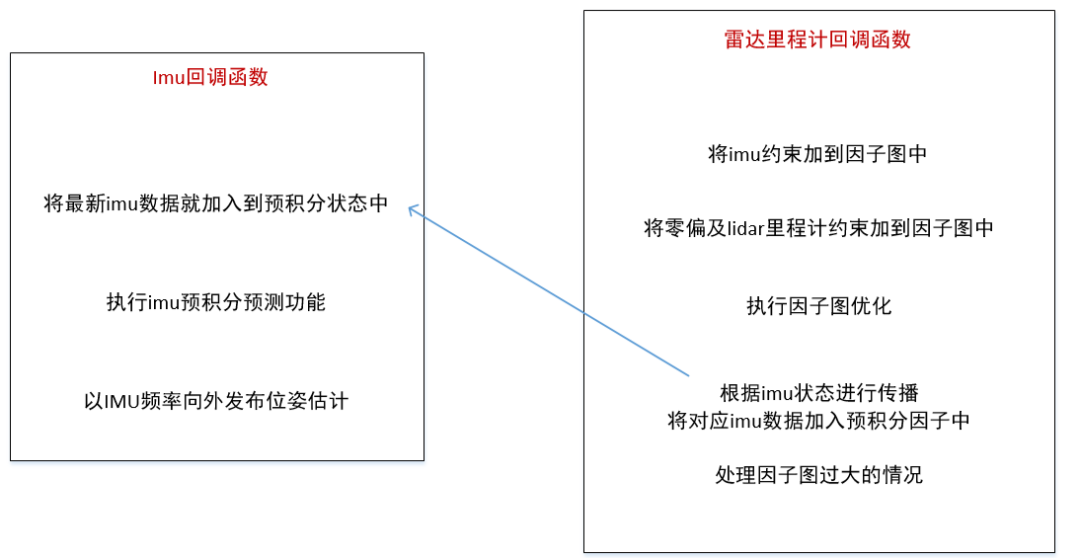
LIO-SAM框架位姿融合輸出
在imu預(yù)積分的節(jié)點(diǎn)中,在main函數(shù)里面 還有一個(gè)類(lèi)的實(shí)例對(duì)象,那就是TransformFusio....
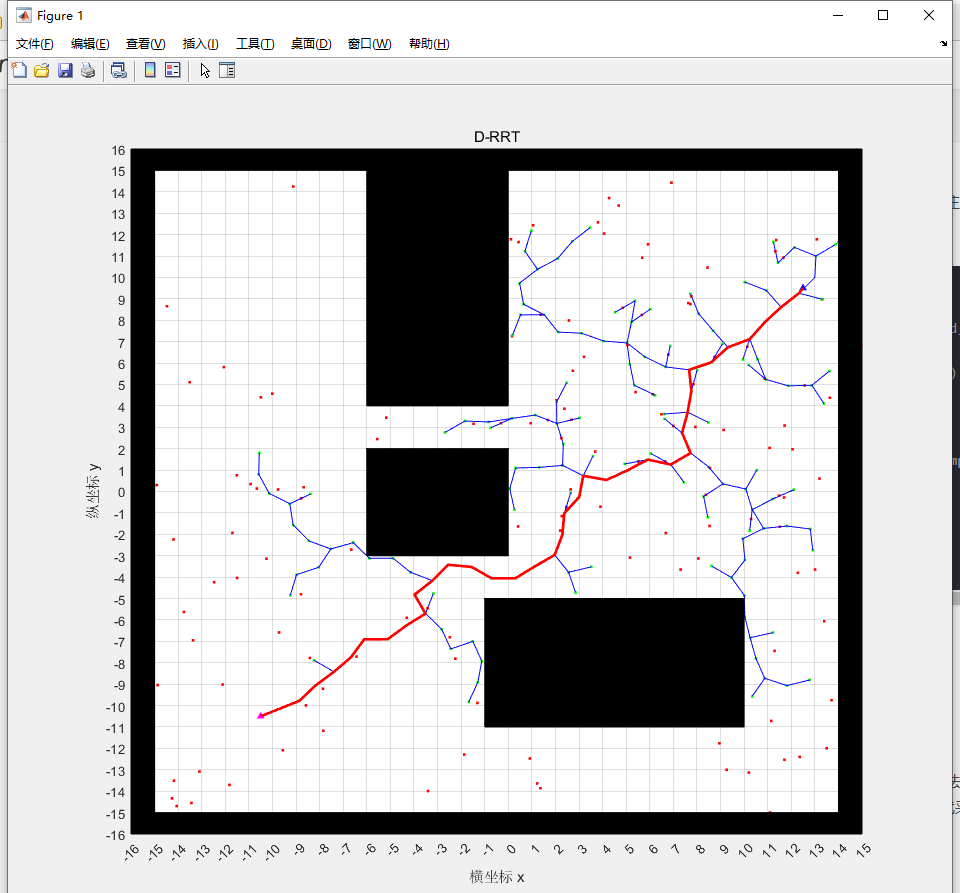
Matlab中如何繪制最優(yōu)路徑
繪制最優(yōu)路徑 從目標(biāo)點(diǎn)開(kāi)始,依次根據(jù)節(jié)點(diǎn)及父節(jié)點(diǎn)回推規(guī)劃的路徑直至起點(diǎn),要注意tree結(jié)構(gòu)體中par....
RRT算法Matlab實(shí)現(xiàn) 主函數(shù)部分
初始化隨機(jī)樹(shù) 初始化隨機(jī)樹(shù),定義樹(shù)結(jié)構(gòu)體tree以保存新節(jié)點(diǎn)及其父節(jié)點(diǎn),便于后續(xù)從目標(biāo)點(diǎn)回推規(guī)劃的路....
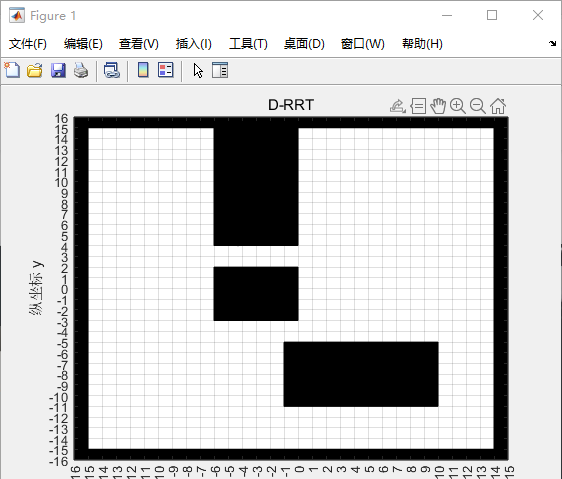
如何編寫(xiě)RRT算法 初始化參數(shù)設(shè)置
使用matlab2019來(lái)編寫(xiě)RRT算法,下面將貼出部分代碼進(jìn)行解釋。 1、生成障礙物 在matla....
全局路徑規(guī)劃RRT算法原理
無(wú)人駕駛路徑規(guī)劃 眾所周知,無(wú)人駕駛大致可以分為三個(gè)方面的工作:感知,決策及控制。 路徑規(guī)劃是感知和....
激光雷達(dá)驅(qū)動(dòng)的安裝與配置
激光雷達(dá)驅(qū)動(dòng) 移動(dòng)機(jī)器人中常用的激光雷達(dá)大多也是USB借口的,比如這款rplidar。 安裝與配置 ....

TogetherROS Bot相機(jī)驅(qū)動(dòng)方法
TogetherROS?·Bot相機(jī)驅(qū)動(dòng) 除此之外,TogetherROS?·Bot中也提供了USB....
USB通信原理以及ROS2相機(jī)驅(qū)動(dòng)安裝
在電腦上,我們最常用的接口之一,應(yīng)該就是USB了,相比之前講到的外設(shè)通信方法,USB更加復(fù)雜,速度也....

Configuration Wizard的語(yǔ)法規(guī)則
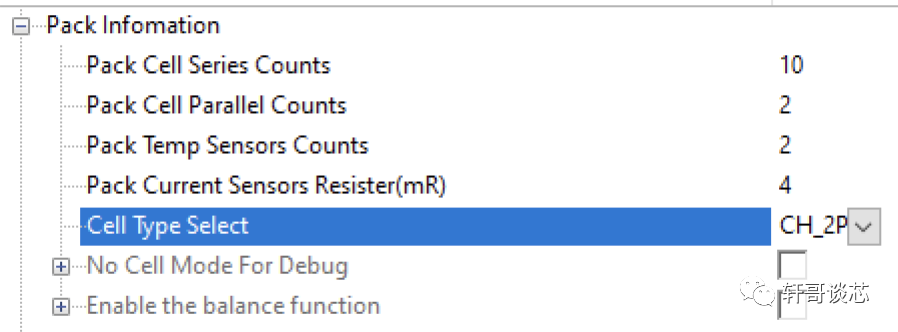
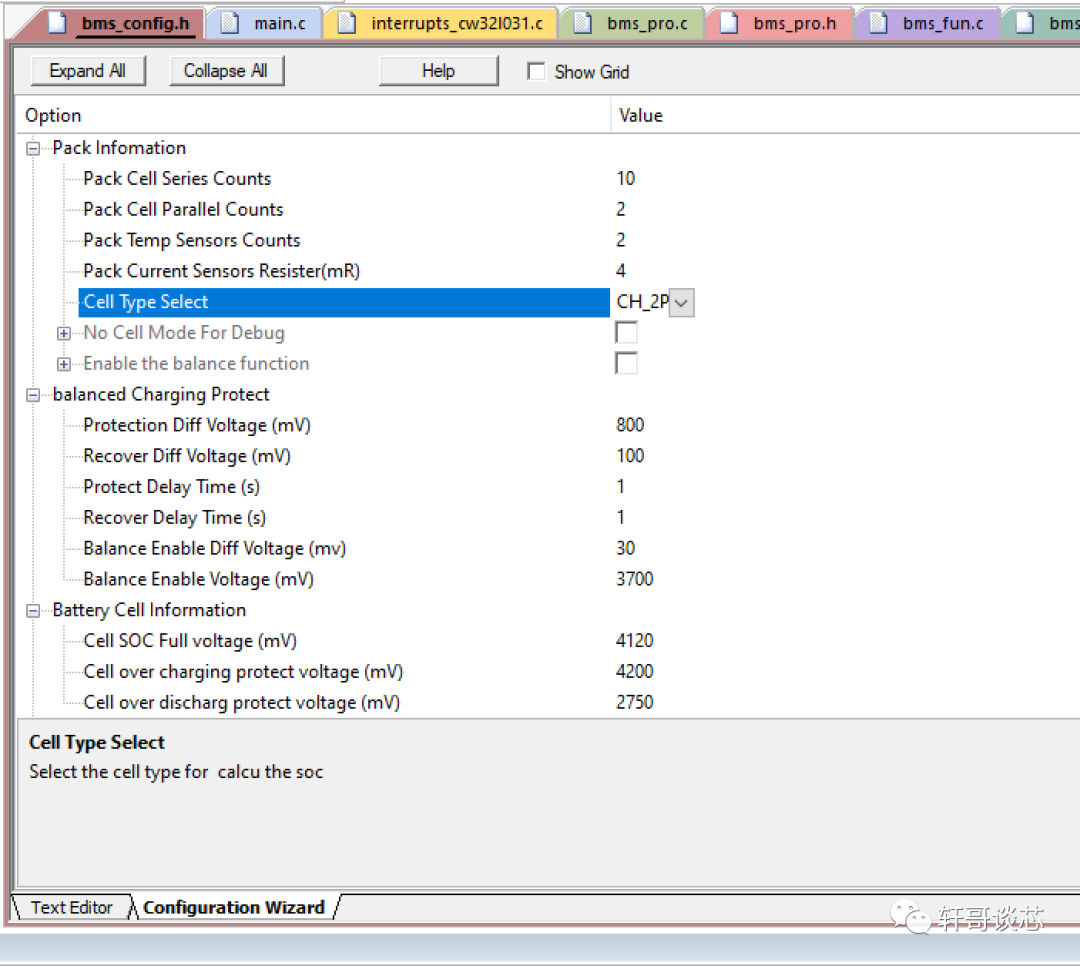
Configuration Wizard的語(yǔ)法規(guī)則 大家如果有使用過(guò)HTML語(yǔ)法,這里就非常容易理解....
Android開(kāi)發(fā)中如何解決典型場(chǎng)景缺通用日志的問(wèn)題
下面針對(duì)一些典型場(chǎng)景缺通用日志(android/kernel)的問(wèn)題,一一列舉如下,希望可以讓大家關(guān)....

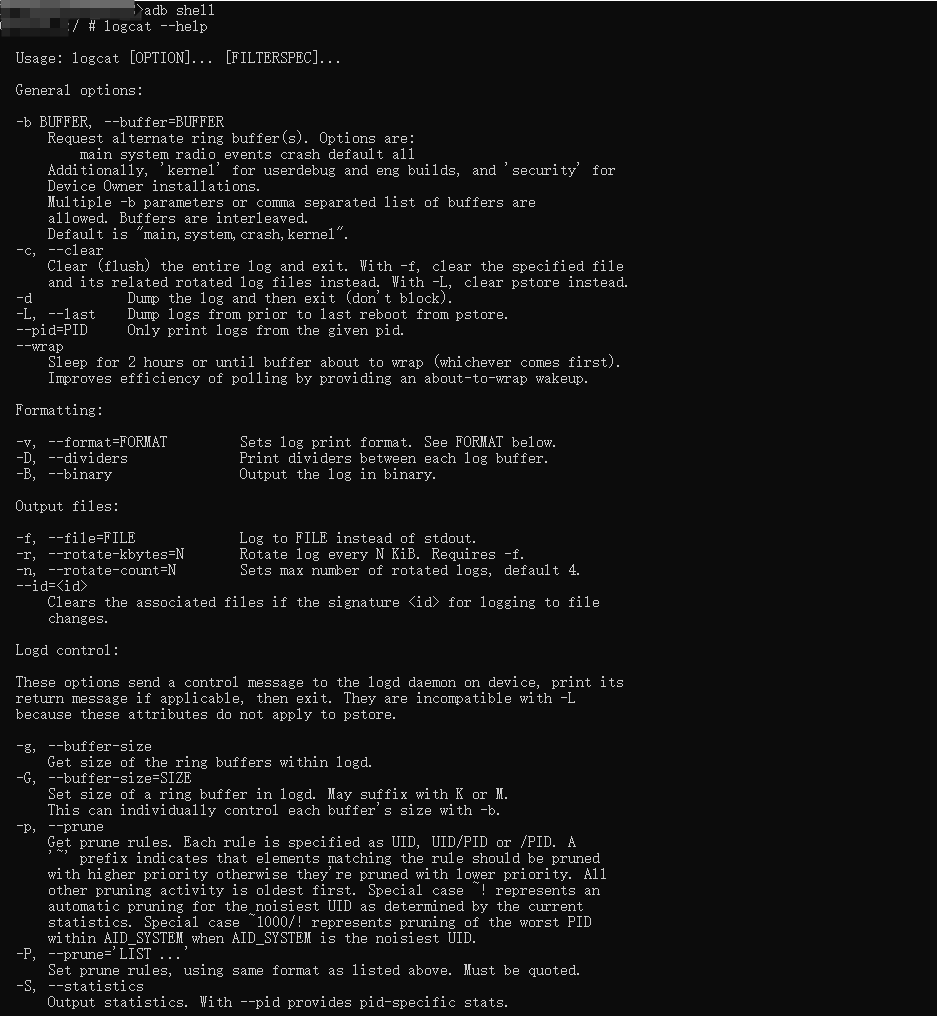
Android開(kāi)發(fā)logcat命令介紹
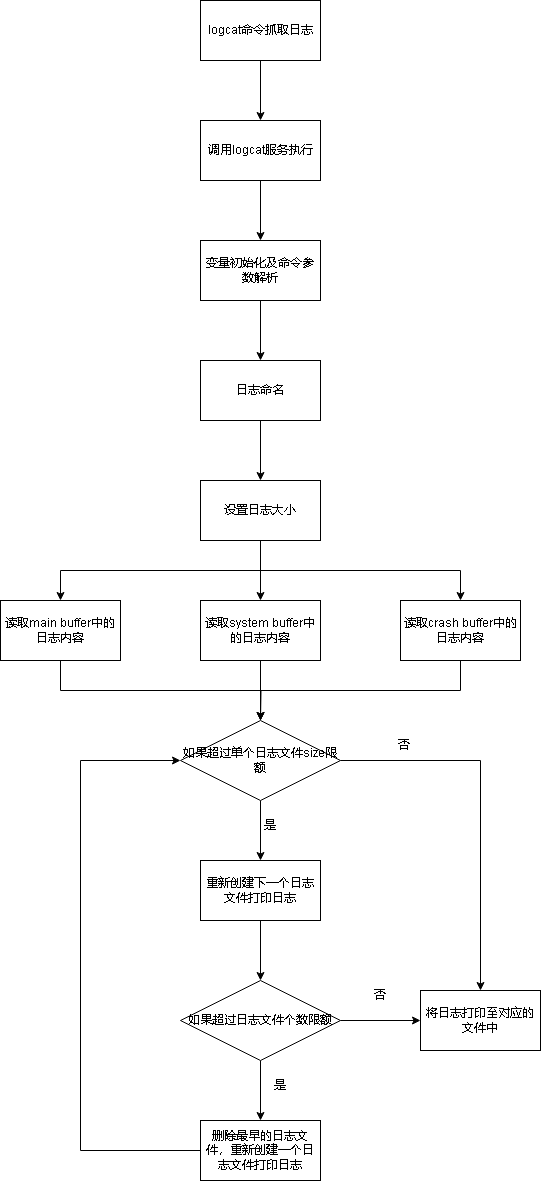
logcat命令介紹 具體的參數(shù)使用可以通過(guò)命令查看,或者查看具體的源碼,當(dāng)然直接查看命令較為方便。....
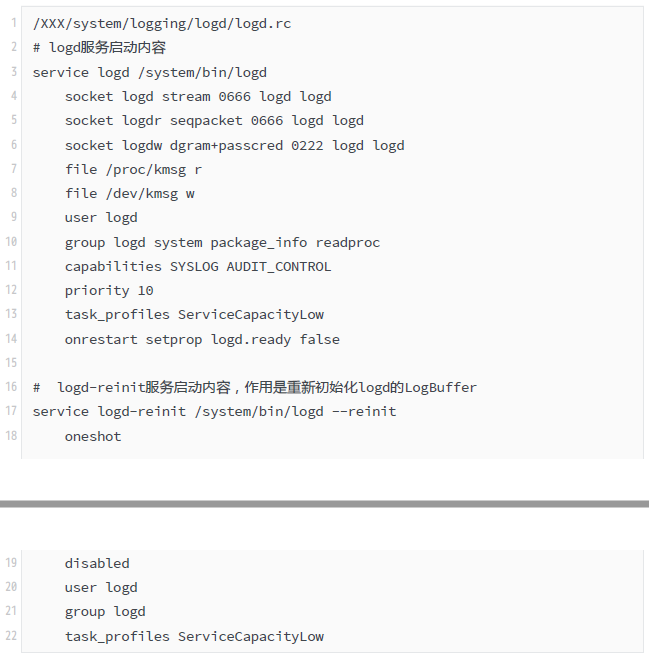
logd的啟動(dòng)過(guò)程和內(nèi)容
logd作為native service,系統(tǒng)啟動(dòng)過(guò)程通過(guò)讀取rc文件來(lái)啟動(dòng),相關(guān)的屬性定義在如下l....
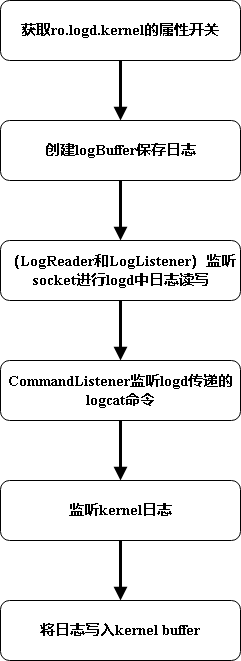
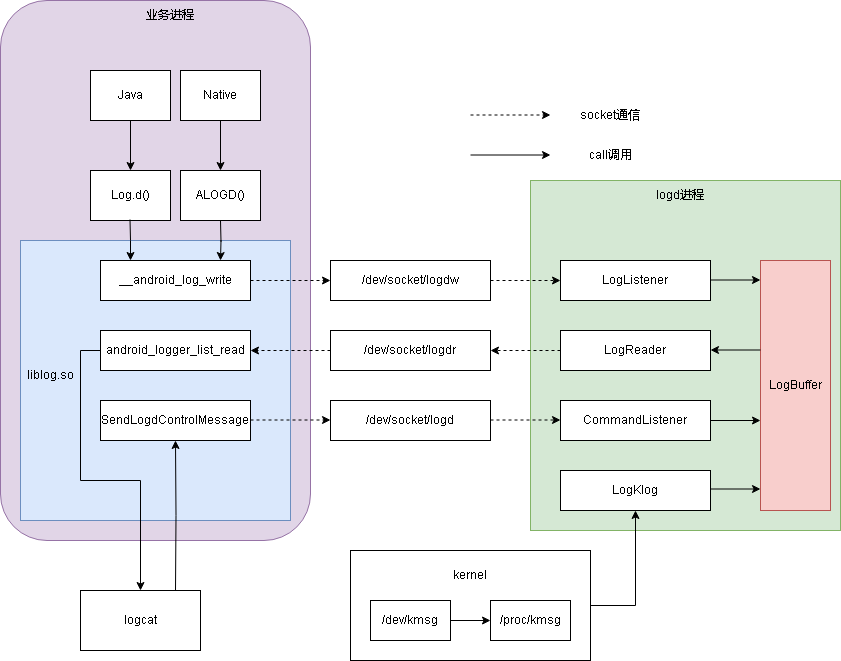
logd守護(hù)進(jìn)程整體設(shè)計(jì)架構(gòu)
2.1 整體設(shè)計(jì)架構(gòu) 2.1.1 logd架構(gòu)設(shè)計(jì)圖 架構(gòu)設(shè)計(jì)圖內(nèi)容簡(jiǎn)介如下: logd啟動(dòng)過(guò)程還存....



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)