

慣性傳感器原理是什么 WHEELTEC N100模塊介紹
車聯(lián)網(wǎng)、自動駕駛、無人駕駛、汽車智能化、網(wǎng)聯(lián)化等成為了汽車行業(yè)的熱點話題,未來汽車一定是朝著安全、可....
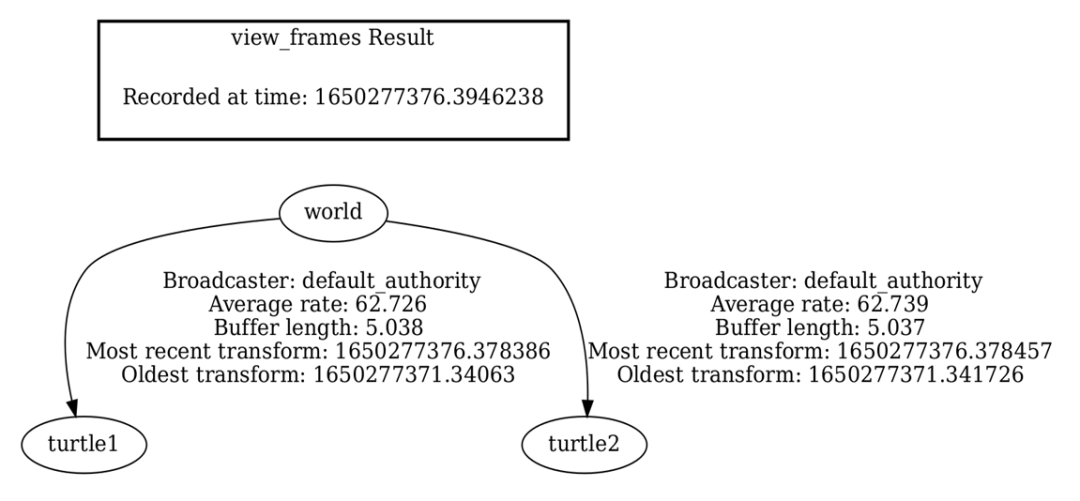
機(jī)器人坐標(biāo)系Launch文件解析
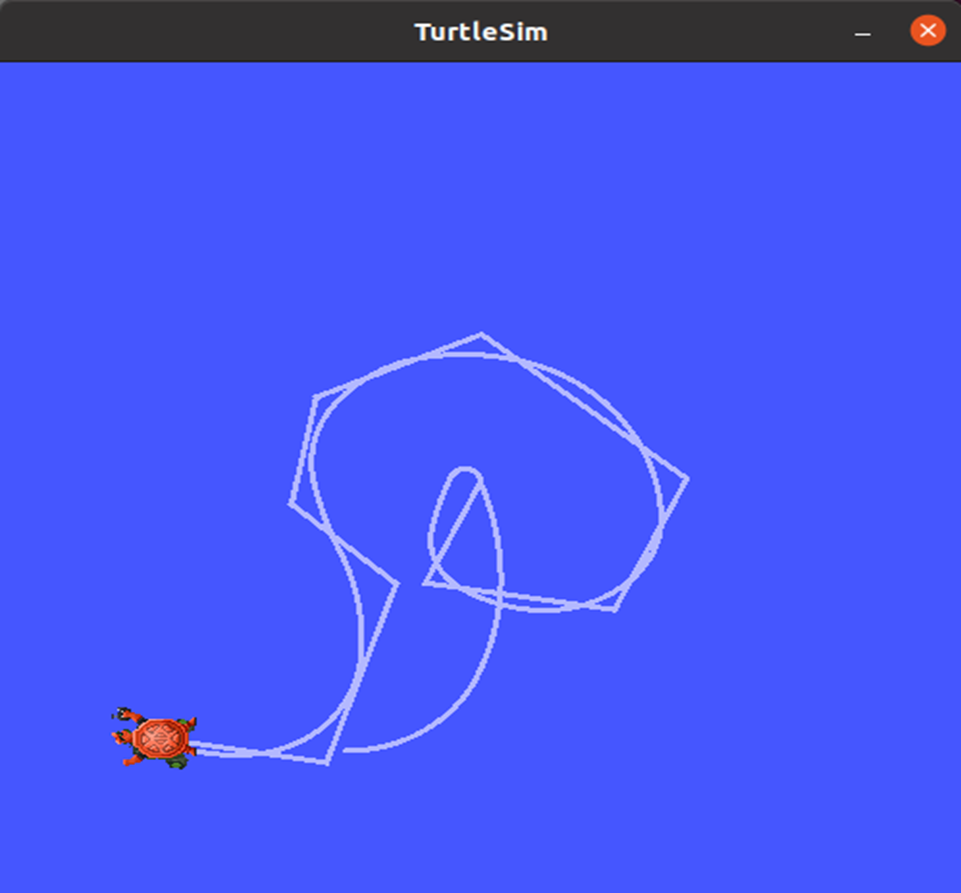
Launch文件解析 先來看下剛才運行的launch文件,里邊啟動了四個節(jié)點,分別是: 小海龜仿真器....
如何對機(jī)器人靜態(tài)TF廣播進(jìn)行管理
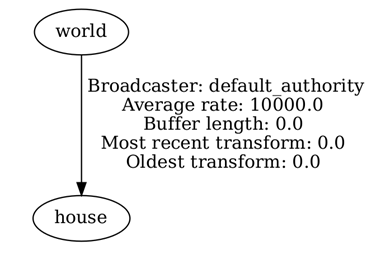
靜態(tài)TF廣播 我們說TF的主要作用是對坐標(biāo)系進(jìn)行管理,那就管理一個試試唄? 坐標(biāo)變換中最為簡單的應(yīng)該....
機(jī)器人中都有哪些坐標(biāo)系
坐標(biāo)系是我們非常熟悉的一個概念,也是機(jī)器人學(xué)中的重要基礎(chǔ),在一個完整的機(jī)器人系統(tǒng)中,會存在很多坐標(biāo)系....

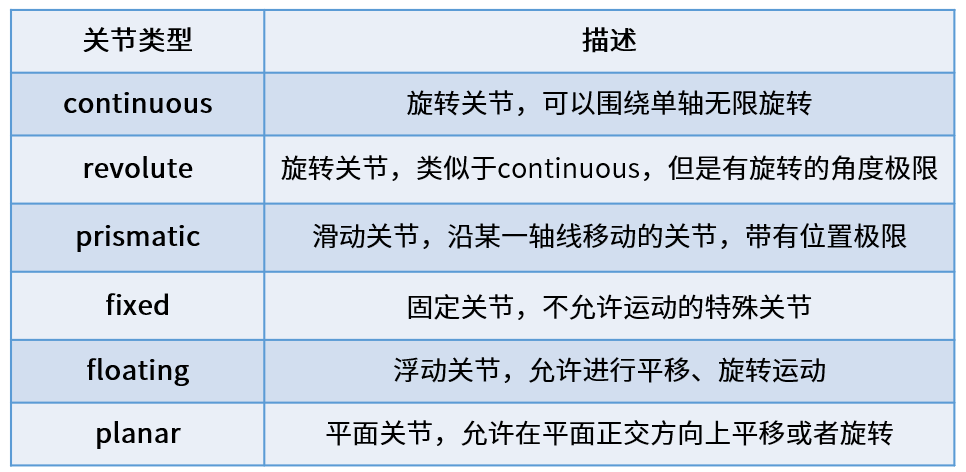
機(jī)器人關(guān)節(jié)Joint描述
機(jī)器人模型中的剛體最終要通過關(guān)節(jié)joint連接之后,才能產(chǎn)生相對運動。 URDF中的關(guān)節(jié)有六種運動類....
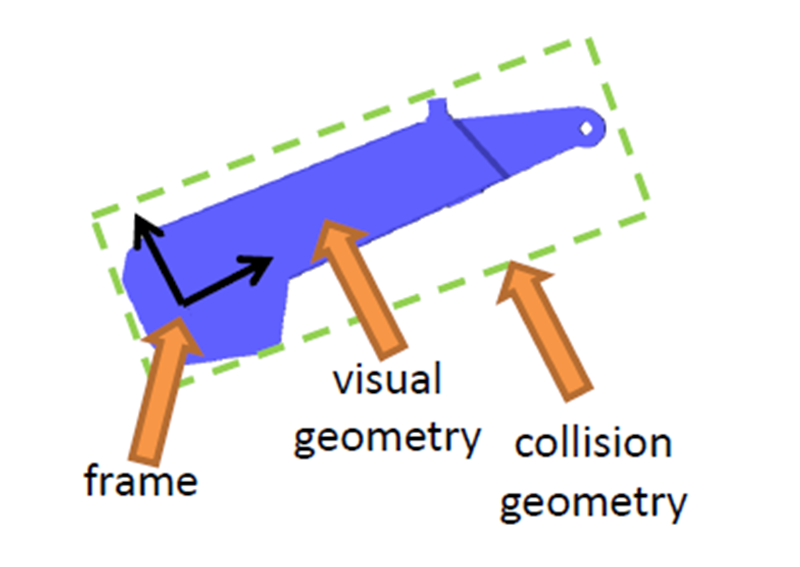
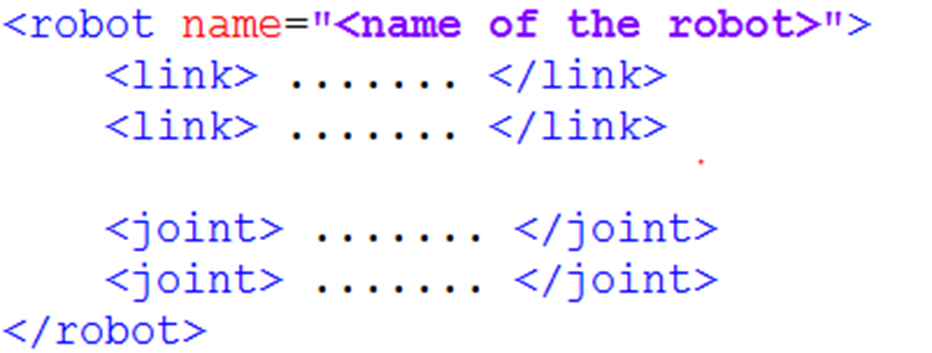
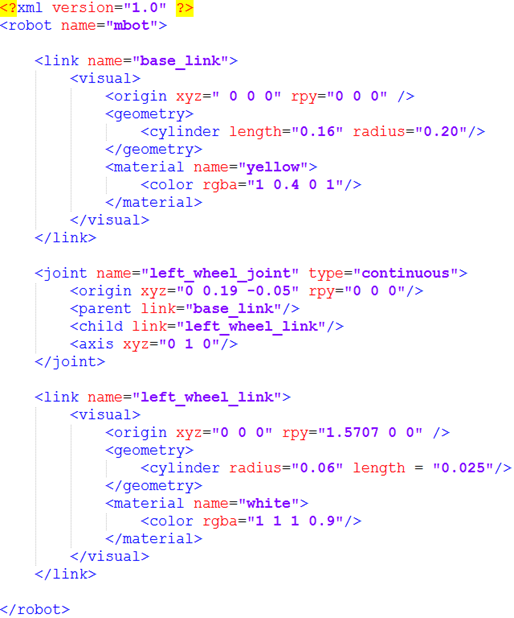
機(jī)器人建模方法和組成
URDF:機(jī)器人建模方法 ROS是機(jī)器人操作系統(tǒng),當(dāng)然要給機(jī)器人使用啦,不過在使用之前,還得讓ROS....
機(jī)器臂柔順控制初步分析
為實現(xiàn)與環(huán)境的安全、柔順交互,需要將機(jī)器人期望動力學(xué)行為與接觸環(huán)境所表現(xiàn)出來的特征進(jìn)行匹配。定性地分....
機(jī)器人柔順控制是什么意思
隨著自動化技術(shù)的不斷進(jìn)步,機(jī)器臂(Robotic Manipulator)在噴涂、上下料、分揀、碼垛....
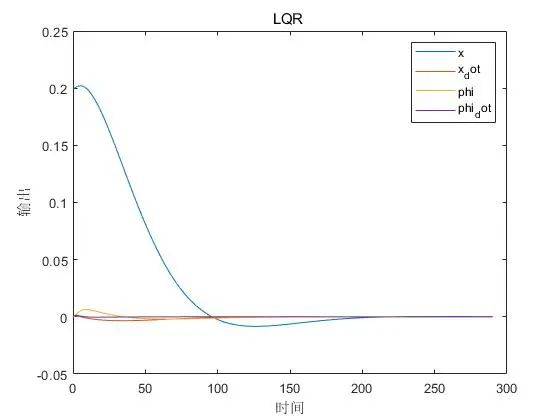
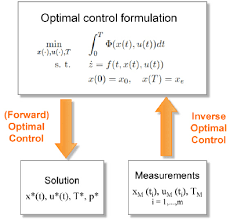
什么是機(jī)器人最優(yōu)控制和逆最優(yōu)控制
機(jī)器人在執(zhí)行期望目標(biāo)任務(wù)時,我們希望機(jī)器人能精確地達(dá)到人類所預(yù)設(shè)的目標(biāo),那么我們就來理解下什么是最優(yōu)....

機(jī)器人擺動相軌跡設(shè)計
1、擺動相軌跡設(shè)計 基于第二節(jié)中提到的原則,文獻(xiàn)[1]中提出了一種基于復(fù)合擺線形式的軌跡規(guī)劃方法,并....
ROS的擴(kuò)展有哪些方法
ROS的擴(kuò)展 ROS除了本身框架性的東西以外,最大的特色就是能融合很多其他的東西,形成一個機(jī)器人開發(fā)....

ROS的簡單開發(fā)及其理解
ROS初探 剛開始入手ROS的時候確認(rèn)有點麻煩,第一它運行在Ubuntu環(huán)境。 不過還是用Ubunt....
PCL中非均勻體素采樣介紹
非均勻體素采樣 SamplingSurfaceNormal,將輸入空間劃分為網(wǎng)格,直到每個網(wǎng)格中最多....
PCL中法線空間采樣介紹
法線空間采樣 NormalSpaceSampling即:法線空間采樣,它在法向量空間內(nèi)均勻隨機(jī)抽樣,....
PCL中最遠(yuǎn)點采樣是什么
最遠(yuǎn)點采樣(Farthest Point Sampling) 這里我們來單獨看一下調(diào)用代碼,這里可以....



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)