
cmd_tbl_t結(jié)構(gòu)體變量調(diào)用命令信息
一個cmd_tbl_t結(jié)構(gòu)體變量包含了調(diào)用一條命令的所需要的信息。 ? 對于環(huán)境變量bootcmd,....

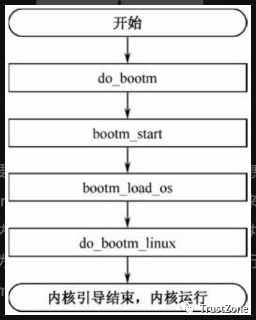
uboot命令的執(zhí)行過程是什么
U-boot是通過執(zhí)行u-boot提供的命令來加載Linux內(nèi)核的,其中 命令bootm的功能 即為....
Linux內(nèi)核中Uboot命令處理
命令處理 main.c中的代碼實現(xiàn)了將一個命令的所有參數(shù)分離存放在argv數(shù)組中,參數(shù)的數(shù)目為arg....
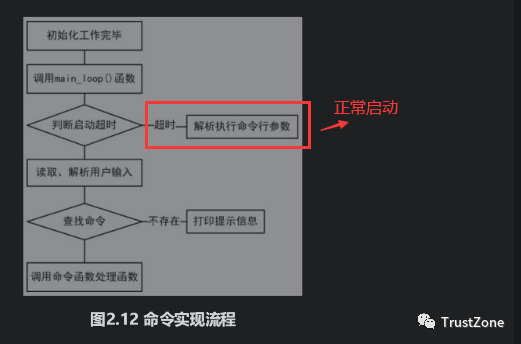
Uboot啟動延時和讀取命令行輸入
1.啟動延時 如果配置了啟動延遲功能,U-Boot等待用戶從控制臺(一般為串口)輸入字符,等待的時間....
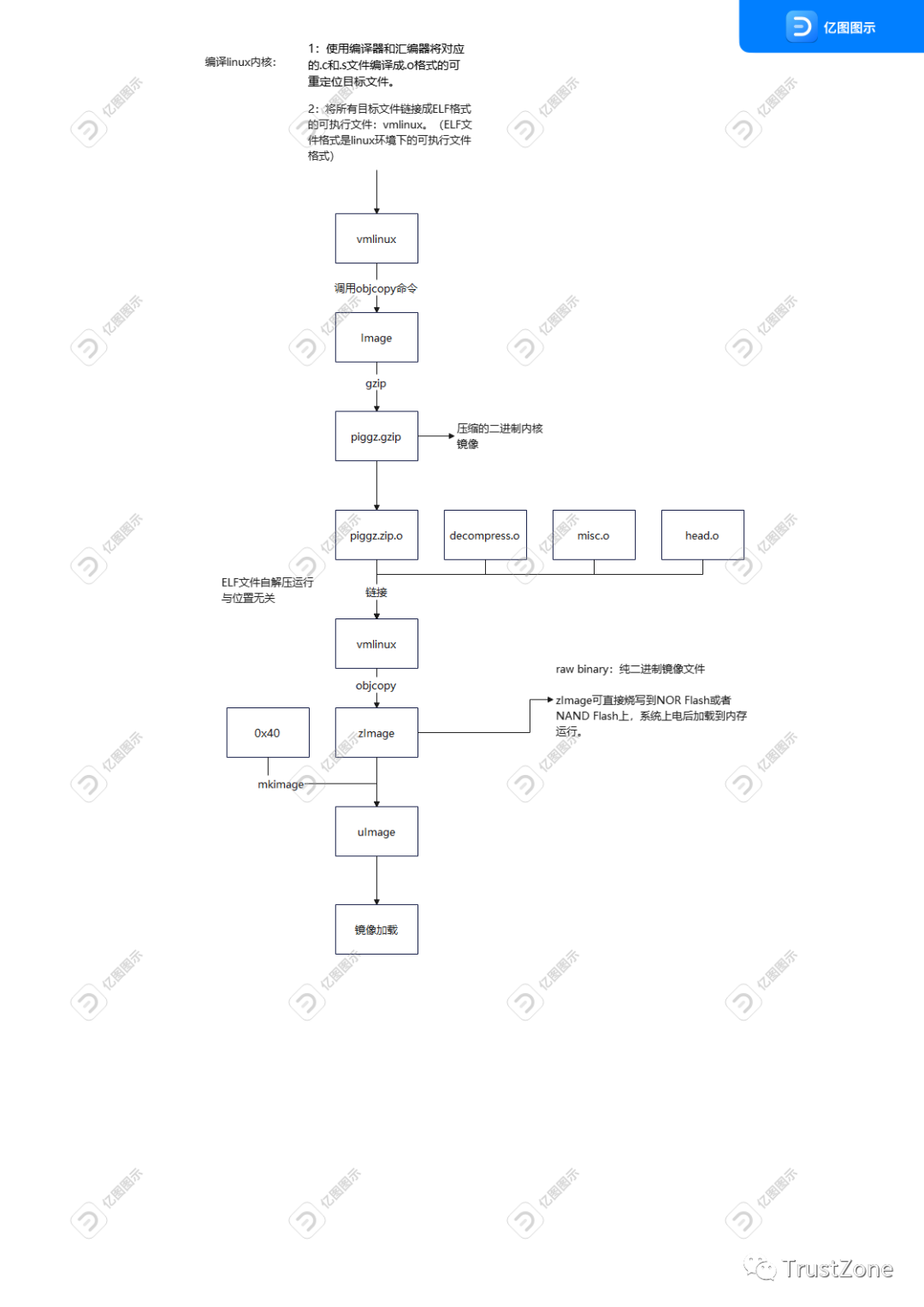
Uboot命令實現(xiàn)大致流程圖
zImage內(nèi)核鏡像下載到開發(fā)板之后,可以使用u-boot的go命令進(jìn)行直接跳轉(zhuǎn),這個時候內(nèi)核直接解....
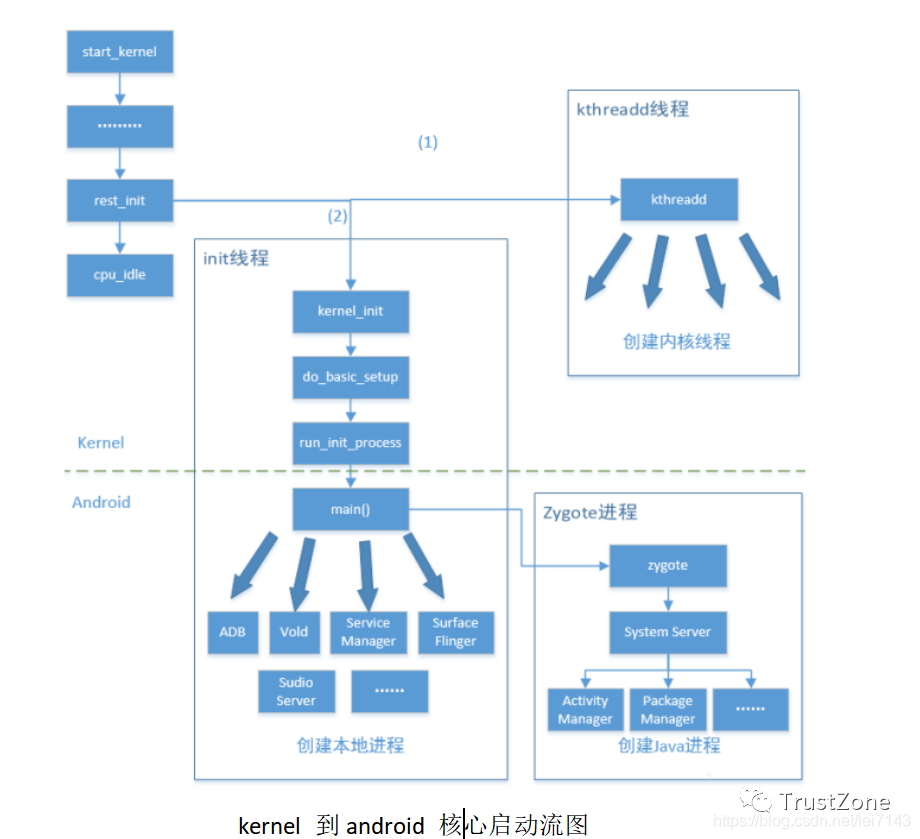
kernel的啟動分為哪兩個階段
kernel的啟動主要分為兩個階段。 1、階段一 從入口跳轉(zhuǎn)到start_kernel之前的階段。 ....
ogetherROS應(yīng)用場景有哪些
相比手機(jī)、電腦等通用平臺,機(jī)器人的類型可是千變?nèi)f化,構(gòu)建機(jī)器人操作系統(tǒng)的難度就遠(yuǎn)比手機(jī)和電腦的操作系....


TogetherROS系統(tǒng)更新和CPU調(diào)頻策略配置
系統(tǒng)更新 第二個配置,是更新當(dāng)前旭日X3派所使用的Ubuntu鏡像,和在電腦上使用的命令相同。 我們....
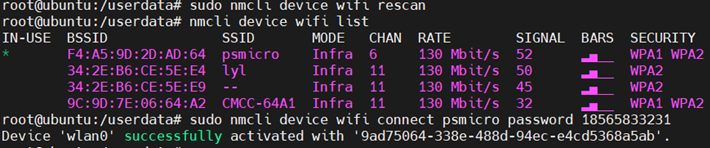
TogetherROS系統(tǒng)中如何配置網(wǎng)絡(luò)連接
無論是旭日X3派,還是TogetherROS,在正式使用之前,都還需要進(jìn)行一些必要的配置,完善必要的....


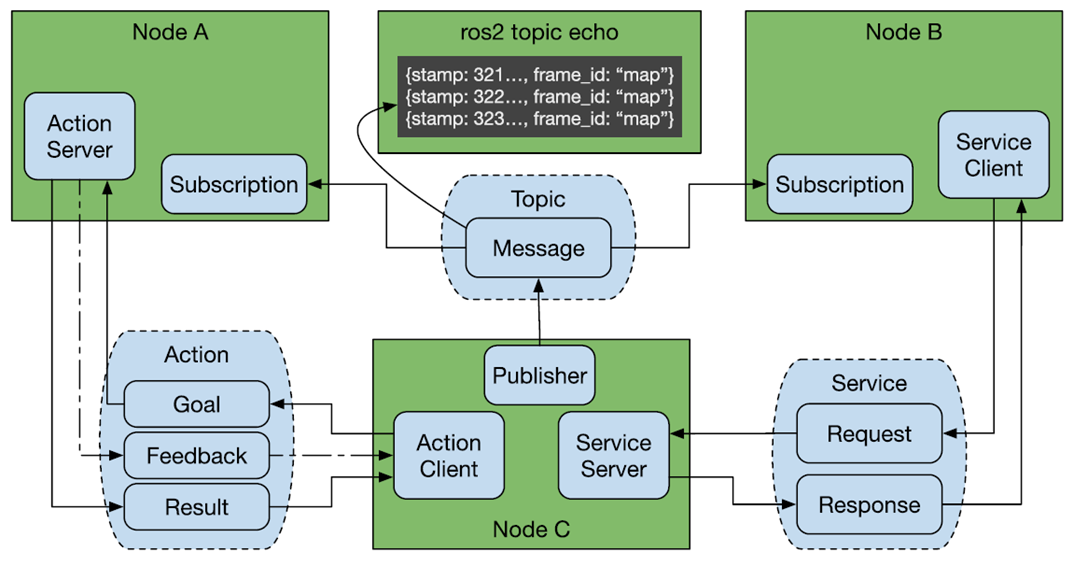
接口的定義 通信接口的作用
通信接口 在ROS系統(tǒng)中,無論話題還是服務(wù),或者我們后續(xù)將要學(xué)習(xí)的動作,都會用到一個重要的概念——通....
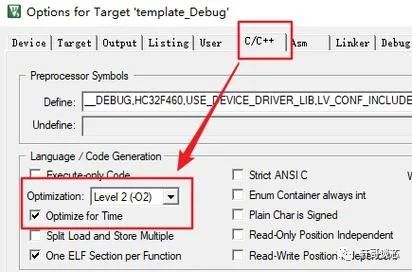
應(yīng)對分支預(yù)測有哪些優(yōu)化措施
應(yīng)對分支預(yù)測有哪些優(yōu)化措施 下面再來看一下分支預(yù)測,這也是 ChatGPT 給出的一個簡易答案 //....
CPU中什么是分支預(yù)測
什么是分支預(yù)測 在超標(biāo)量的流水線架構(gòu)上,我們得知,CPU 在運(yùn)行指令的時候,會在一個時鐘上做多個操作....


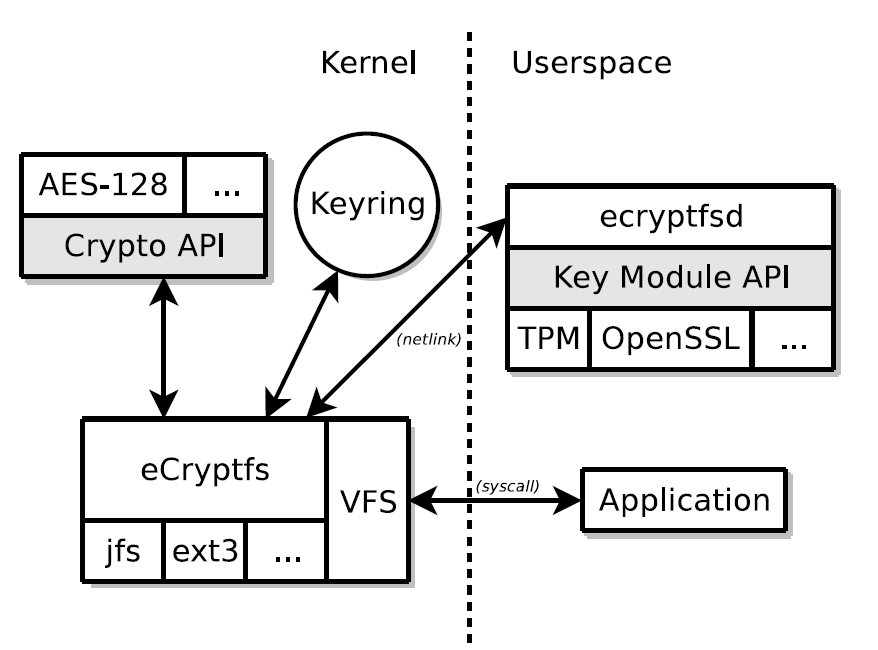
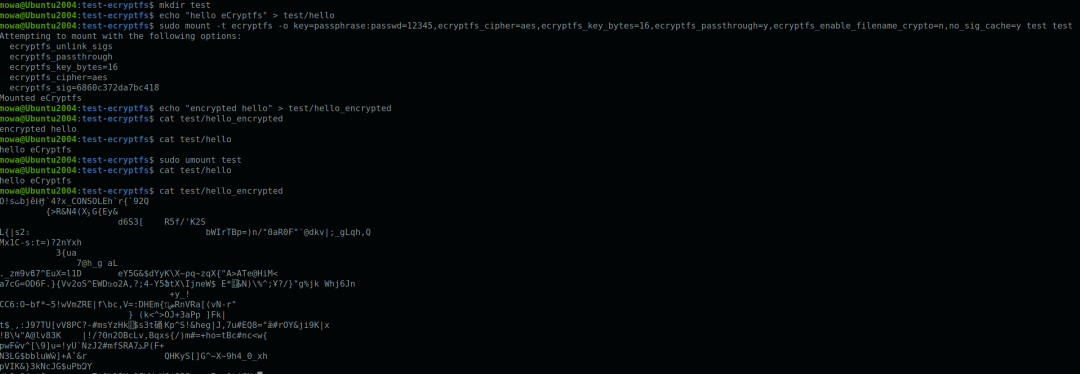
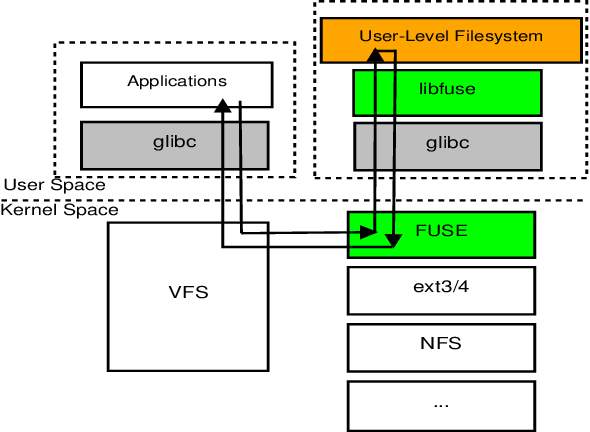
eCryptfs整體架構(gòu)和核心加解密機(jī)制介紹
整體架構(gòu) eCryptfs整體架構(gòu)如下圖,主要是內(nèi)核模塊eCryptfs以及用戶態(tài)進(jìn)程ecryptf....
Linux系統(tǒng)中的FBE實現(xiàn)方案和特點
Linux系統(tǒng)FBE 從Linux系統(tǒng)軟件架構(gòu)看,典型FDE和FBE實現(xiàn)方案分布如下圖,包括基于dm....




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)